Page 4 sur 9
Re: présentation de seb03000
Posté : 16 août 2011, 13:01
par seb03000
ok Atvmax et merci la commande je la ferré le moi prochain
Re: présentation de seb03000
Posté : 18 août 2011, 10:31
par Panthere03
bienvenu a toi seb03000
Re: présentation de seb03000
Posté : 18 août 2011, 12:54
par seb03000
merci Panthere03 ravie de te connaitre
Re: présentation de seb03000
Posté : 01 sept. 2011, 11:42
par Cynder
Bienvenue à toi.
Pour la robotique, en fait j'utilise des pics. Ça se programme pareil que les arduino (à peu près) mais la différence est que pour les pics, il faut tout monter sois même. Les arduino ont tout les composants nécessitant leur fonctionnement incorporé à l'achat, alors que lorsque l'on achète un pic, il faut calculer les composants et tout monter sois même (quartz, transistor,...)
Spinal, a titre de comparaison, un arduino représente le java (voir un langage encore plus évolué) tandis que le pic représente le C voir l'assembleur.
Arduino, c'est beaucoup plus confortable à utiliser, mais c'est aussi beaucoup plus couteux car il est déjà tout monté et inclus beaucoup de fonctionnalité qui ne serviront pas au projet.
Pour faire une bombe pour la team, ça serai génial, par contre vu le prix de revient, c'est inenvisageable de la faire commercialiser.
Quoi qu'il en soit, bienvenue et ravi d'avoir dans la team un autre gars qui s'y connais la dedans. On va pouvoir discuter, j'ai plein de projets en tête

Re: présentation de seb03000
Posté : 02 sept. 2011, 11:08
par Destructor
Benvenue parmi nous et espere te compter à nos cotes.
Re: présentation de seb03000
Posté : 02 sept. 2011, 17:39
par seb03000
salut Cynder je suis aussi ravie de voir quil y a des connaisseuse.
Tu alaire caler je voie.
Moi ya pas longtemps que jai appris la programmation langage C C++ moi aussi jai plein d’idée mais le budget ne suis pas lol .
Jai monter un forum il se nome robotique-driver , il est tous frais conçu ya peux de temps quil est ouvert
http://robotique-driver.faireforum.com/
Et merci a toi Destructor ten fait je serré la samedi je suis op tu sera la jéspére???
Re: présentation de seb03000
Posté : 26 sept. 2011, 12:20
par seb03000
Bonjours a tous les amies
Voila ils vons renouvelé mon contras donc Greg, je vais pouvoir tacheter le P90 que tu vend ( que tu m'avais parlé )
Donc réserve le moi mais le de coté si tu veux biensure merci.
Re: présentation de seb03000
Posté : 02 oct. 2011, 14:08
par seb03000
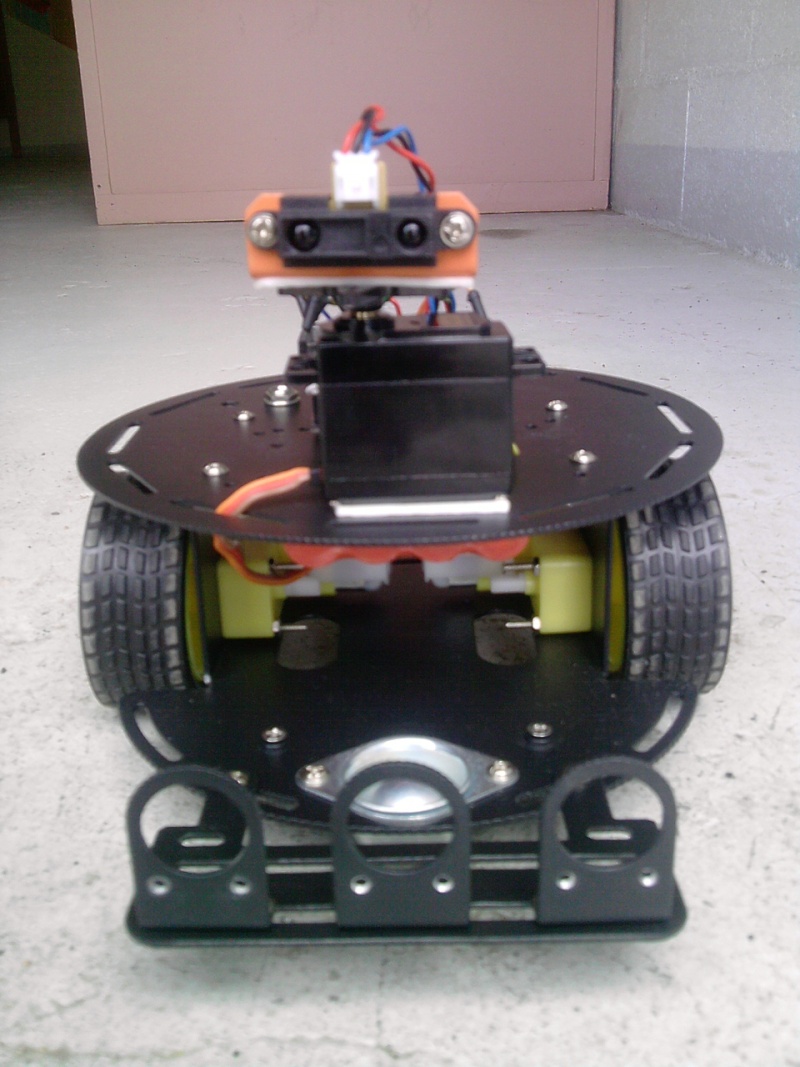
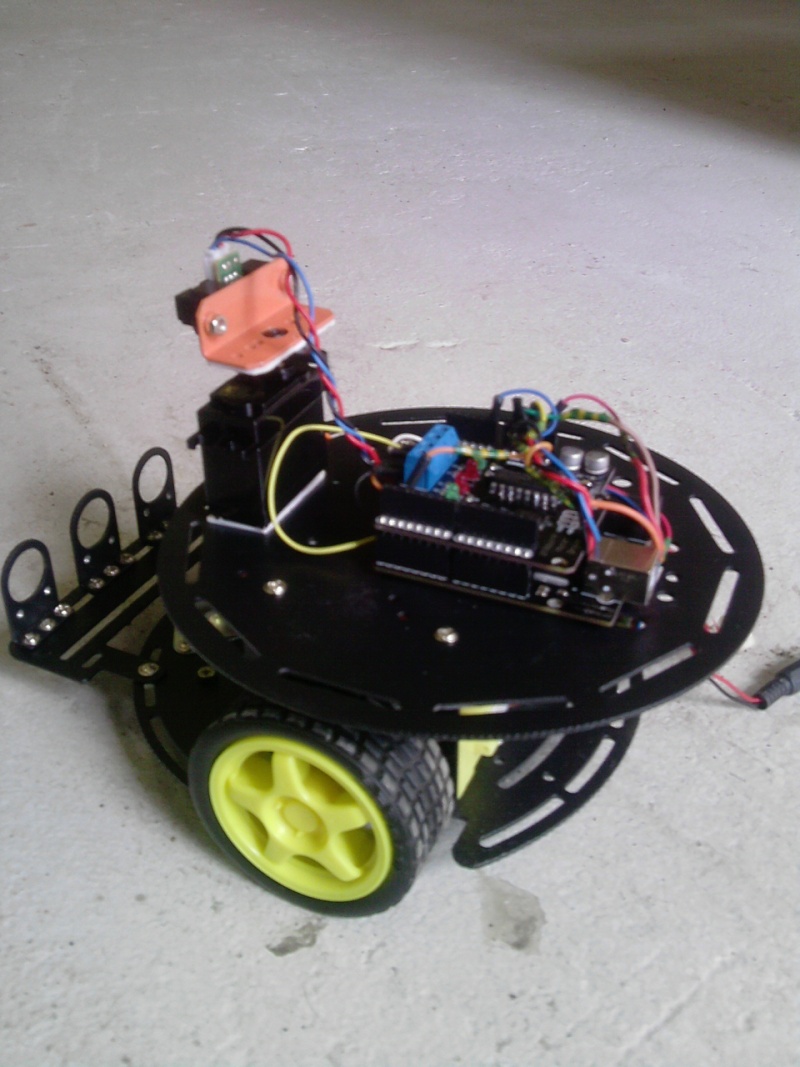
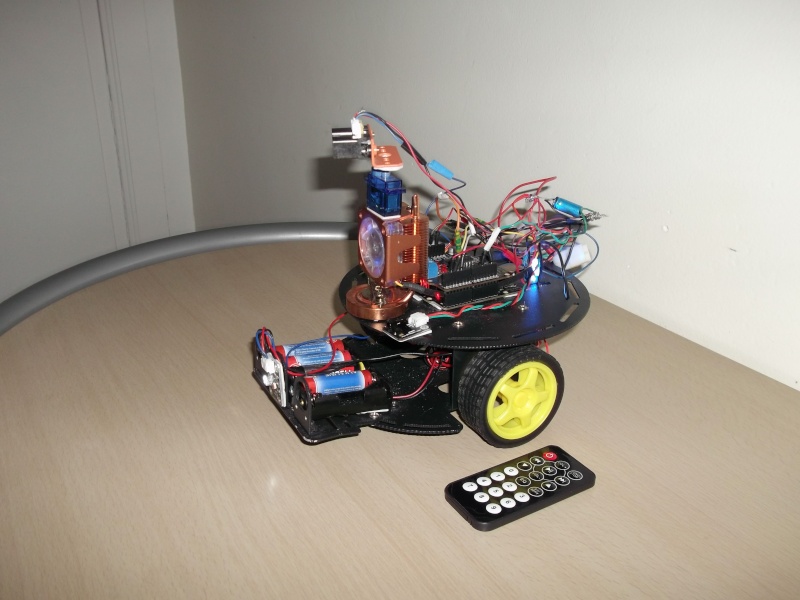
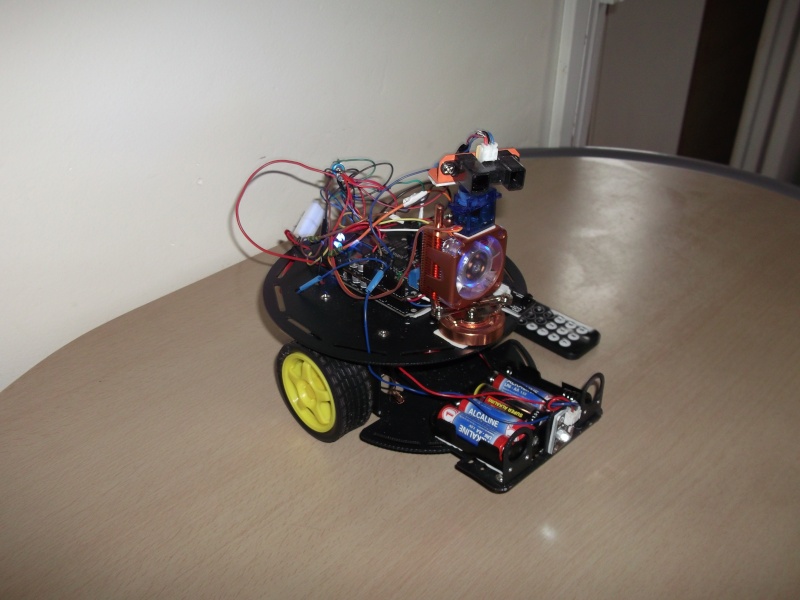
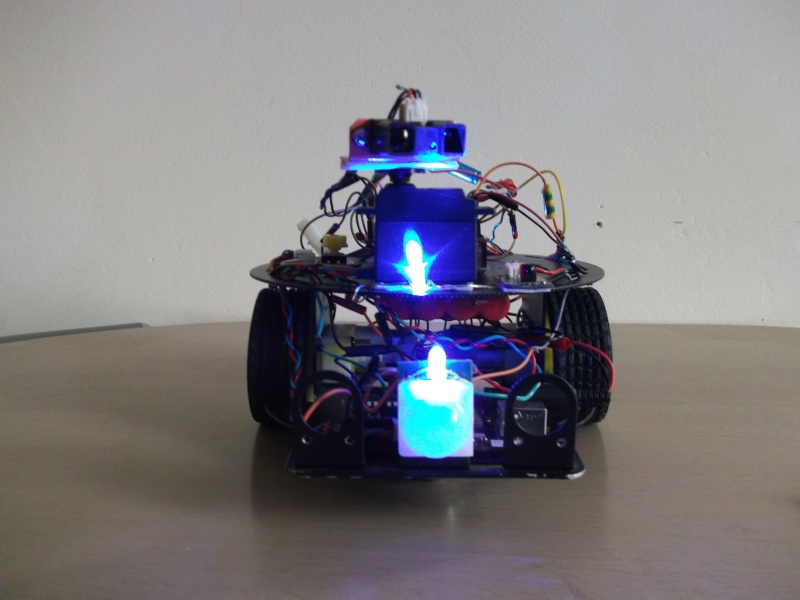
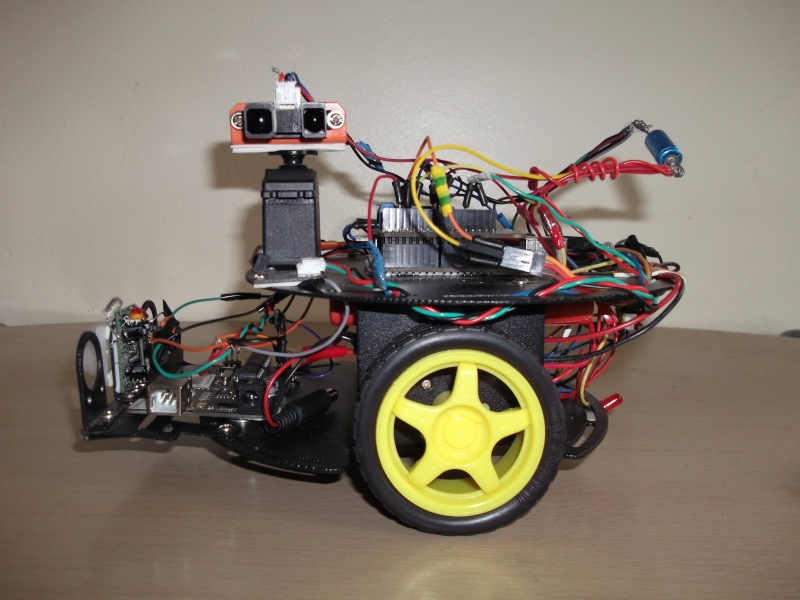
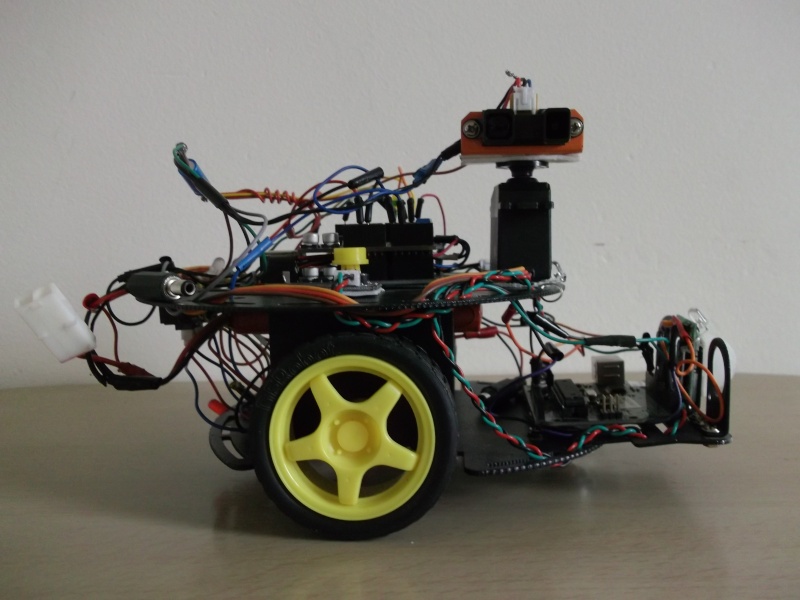
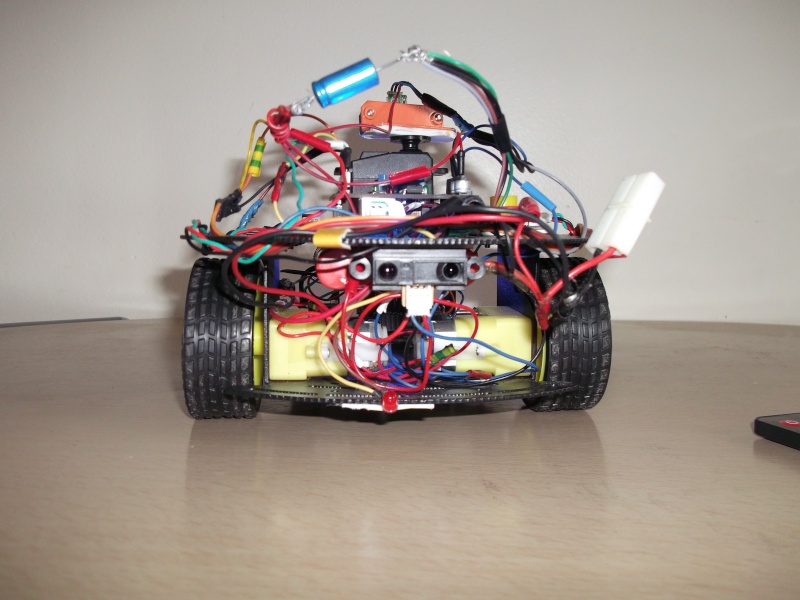
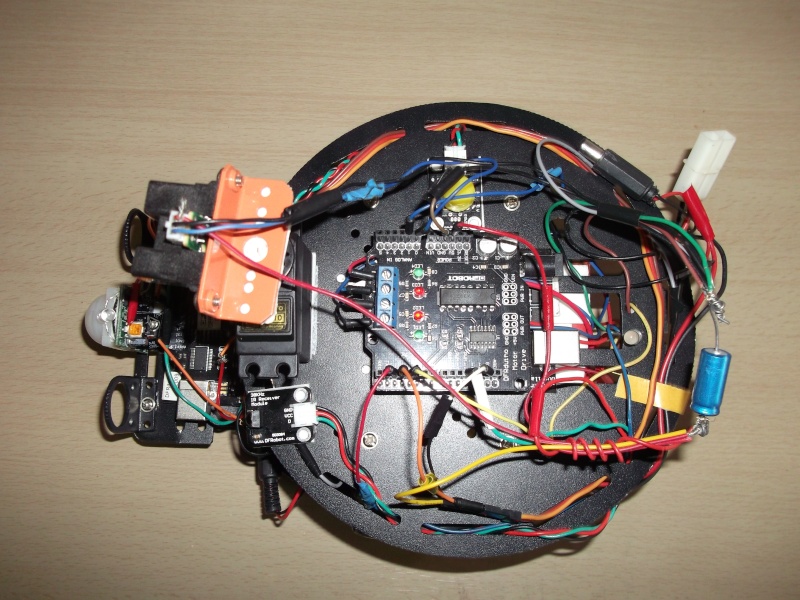
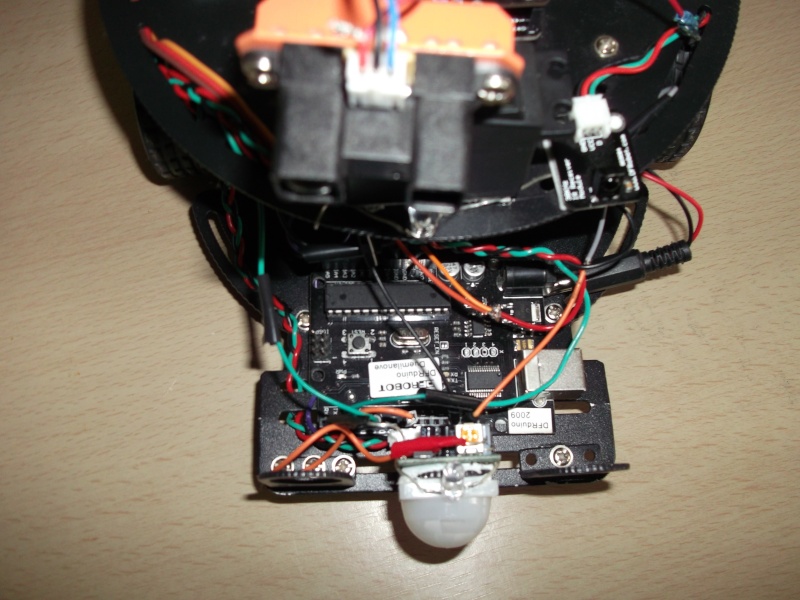
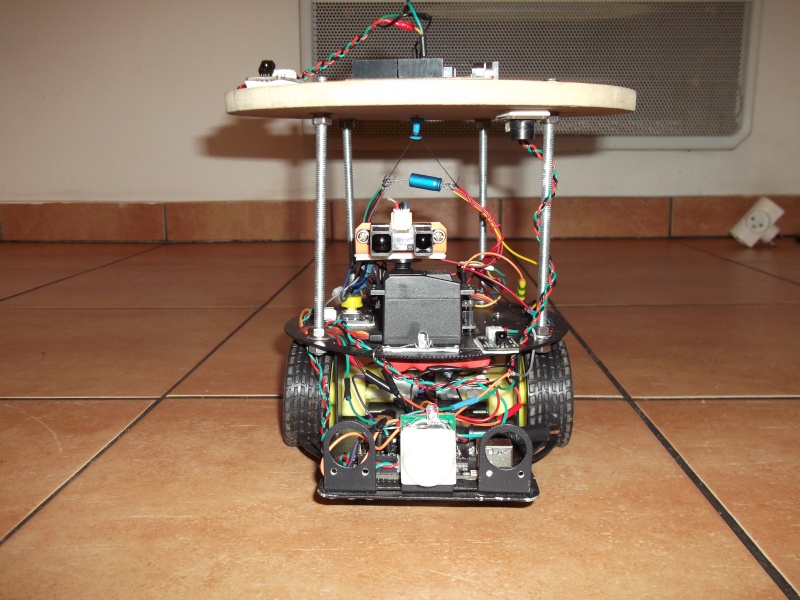
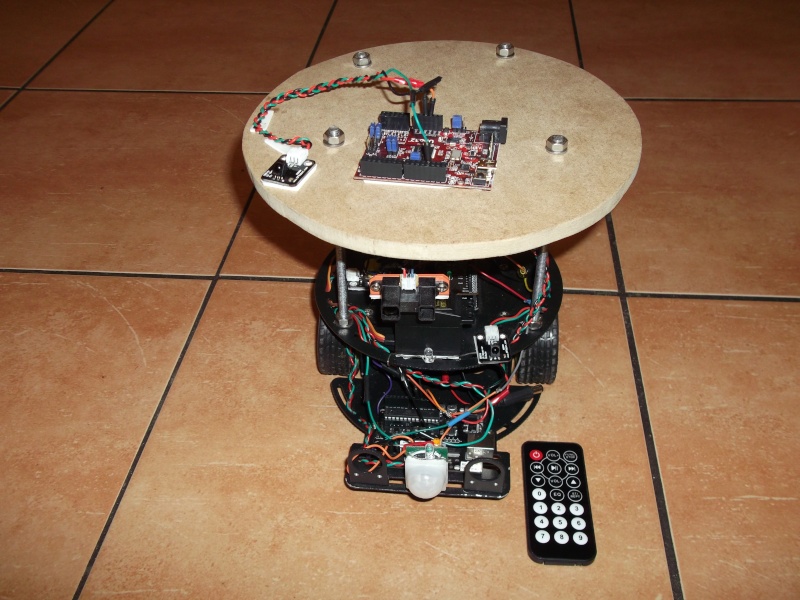
Bonjour les amie bon comme je suis handicapée a cosse du pousse casser lol ,
je me suis amusé a finaliser mon robot Jardise , est aussi d'autre truc intéressent je vous en ferré pare , je vous donne une vidéo: je vous la passe en lien carre le module de youtube ne marche pas.
http://youtu.be/jHskIqY0dmI
Re: présentation de seb03000
Posté : 02 oct. 2011, 14:53
par Spinal
Bien ça !
Va falloir nous bricoler une tourelle automatique pour les parties

Re: présentation de seb03000
Posté : 02 oct. 2011, 18:20
par seb03000
Tu veux que je te fasse une tourelle automatique???
J’espère que vous avais les moyen alors.
Est si vous voulez une tourelle automatique , quel serré sa fonction??
Il me faudra un plant dessiné ou un plant électrique ou une photo chipé sur le nette pour un exemple.
Re: présentation de seb03000
Posté : 02 oct. 2011, 18:36
par Spinal
Un système pivotant horizontalement qui se tourne vers le dernier mouvement détecté, et avec une réplique avec laquelle il tire tant que ça bouge par exemple.
En bâtiment ça serait top un truc pareil.
Re: présentation de seb03000
Posté : 02 oct. 2011, 18:57
par seb03000
Bon c'est feussable le souci cest qu'il faut trouvez un méchant servomoteur ,est un méchant capteur qui détecte de loin,
mais j'ai ma petite idée pour le capteur , la Kinect de la xbox360 elle intègre la 3D la détection de chaleur et vision nocturne
et les mouvement biensure .
Pare contre j'ai jamais pue programmé une Kinect , mais jan cherche une pour mon robot ( elle vaux chaire encore. )
C'est pour voir se quel a dans la guele ( sans être grossier ) cette Kinect.
Est le projet pourrai être long par contre , sur tous la programmation .
Re: présentation de seb03000
Posté : 02 oct. 2011, 19:04
par Atvmax
Des Kinect on commence à en trouver en brocante, au cas ou.

Re: présentation de seb03000
Posté : 02 oct. 2011, 19:08
par seb03000
je suis accourent Atvmax mais a 80 euros , désolé je me fait pas une paye a 1100 euros moi , ma paye et bien passe donc
j'attent que la Kinect baisse encore son prix. Désolé.
Re: présentation de seb03000
Posté : 02 oct. 2011, 19:11
par Spinal
C'était une idée comme ça hein, ne te met pas la pression
Par contre si jamais un jour tu as une idée précise d'un robot dans le genre qui pourrait servir pour l'airsoft, n'hésite pas à préparer un petit topo dessus, et la liste du matos que tu aurai besoin pour le faire : on pourra soumettre ce projet à l'association dans une assemblé générale pour que l'association le finance par exemple
(par contre il nous faudrait un terrain adapté).
Re: présentation de seb03000
Posté : 02 oct. 2011, 19:32
par seb03000
Ne ten fait pas Spinal je me suis pas énervait ni en pression tkt.
Bon pour un tél projet je serré partent mais il vas me valoir un gas qui se conné aussi en programmation sa m'avancera.
Pour le terrain et bien javais pencé a Couzon ( pourquoi la bas , et bien ya pas de passant et de voiture qui circule , cest
bien disposer. )
Re: présentation de seb03000
Posté : 03 oct. 2011, 13:04
par seb03000
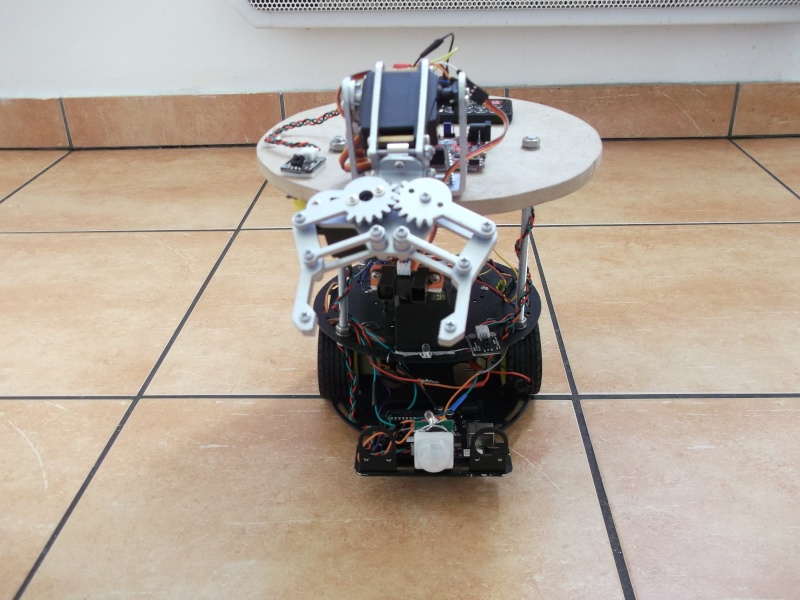
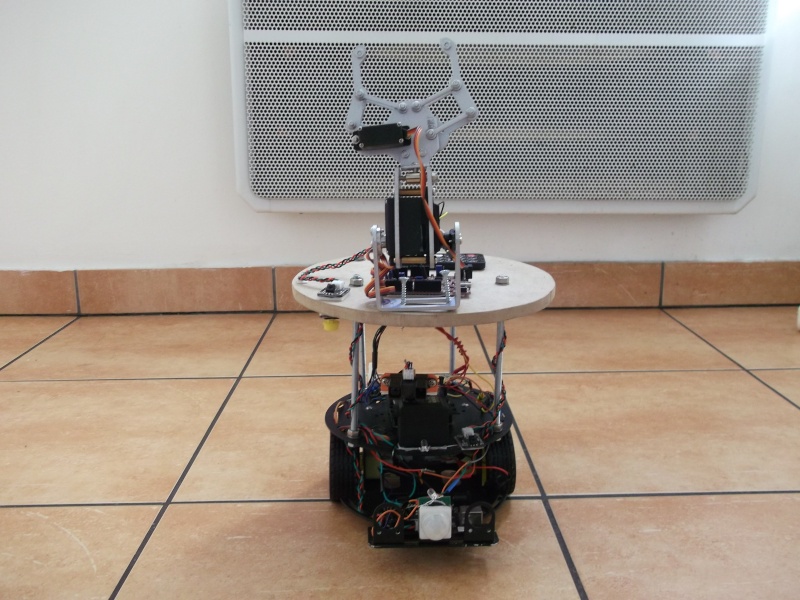
Salut les gas
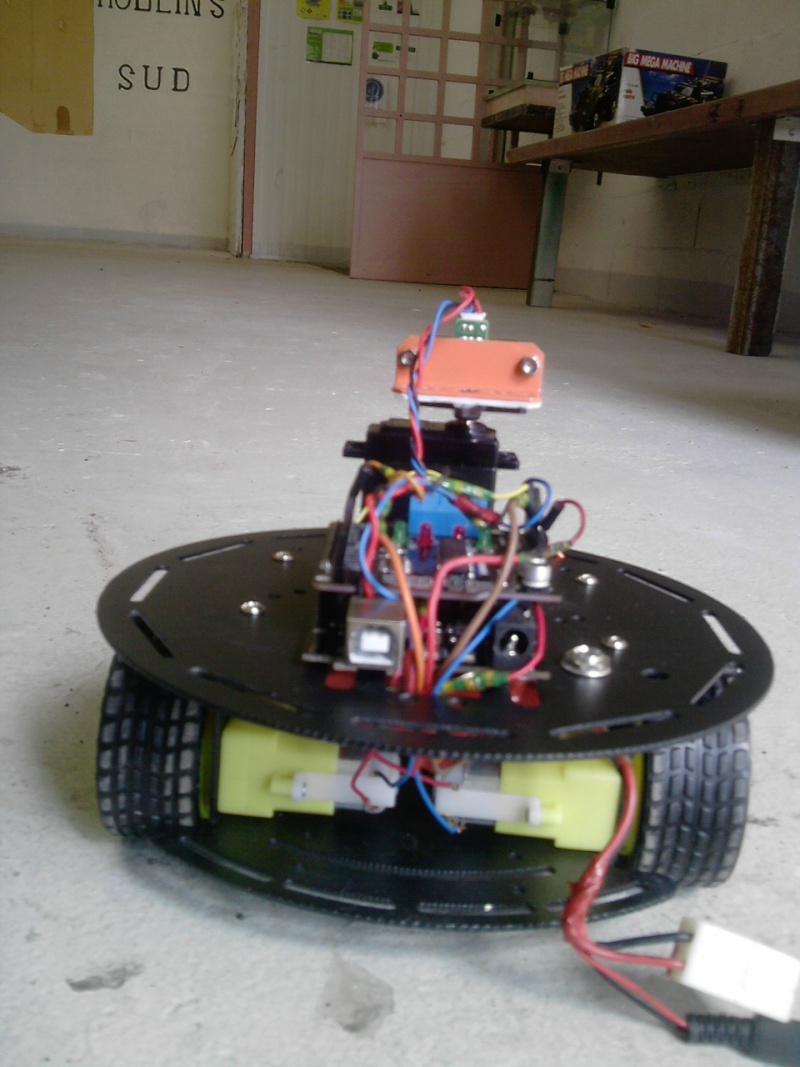
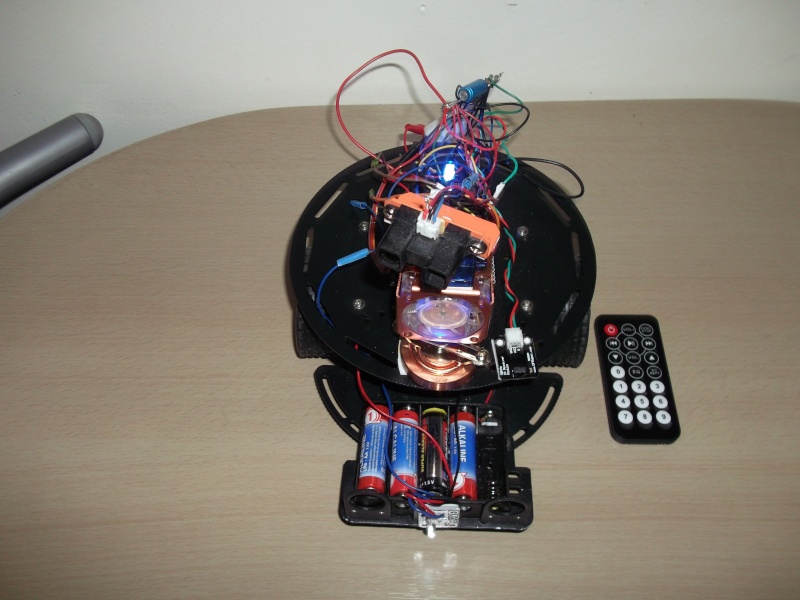
Bon , voila j'ai pue trouver un exemple d'un servomoteur pour une tourelle voici une vidéo
que j'ai fait.
http://youtu.be/7KqHhFfe1Mw
Et pour déclencher la cachette de la réplique , j' approprier se servomoteur la

il est a 6,99 € TTC
Manque plus que le capteur Kinect et Carte DFRduino Duemilanove 328 est tous les composant pour maintenir la réplique , la faut être imaginatifs.
Achat:
Servomoteur pour tourelle : prix: 35.93 € TTC
Kinect xbox360 : prix : 85,00 € TTC
Et une batterie de 9.6V : prix: 35,00 € TTC
Servomoteur pour la cachette: prix 6,99 € TTC
Carte DFRduino Duemilanove 328: prix 21,00 € TTC
Kit de 20 fils connecteurs mâle/mâle spécial Arduino: prix : 4,99 € TTC
Et les support pour la réplique divers pièce: prix : a voir
J'ai déjà commencer a préparé le code pour le servomoteur de la tourelle.
Re: présentation de seb03000
Posté : 12 oct. 2011, 11:04
par Cynder
Pour le code, je suis développeur de métier. Donc si tu veux qu'on y regarde y a aucun souci
Re: présentation de seb03000
Posté : 12 oct. 2011, 17:11
par seb03000
bonsoir Cynder.
Code : Tout sélectionner
Pour le code, je suis développeur de métier. Donc si tu veux qu'on y regarde y a aucun souci
ok je serré partent , avec plaisir.
J'ai déjà commencé a faire un morceaux de code pour le servomoteur de la tourelle.
Je programme avec le langage de l'arduino , je cest pas si tu conné ???
Je te passe le lien
http://www.mon-club-elec.fr/pmwiki_refe ... in.Debuter
Et si tu veux voir de quoi je suis capable , voici mon forum et programmation robotique
http://robotique-driver.faireforum.com/
Voila le code:
Code : Tout sélectionner
#include <Servo.h> // librairie pour servomoteur
///
/// Déclaration des constantes
///position des servomoteure
const int POS_MIN_Z = 500; // Position min pour servo pour rotation sur axe des z
const int POS_MAX_Z = 2500; // Position max pour servo pour rotation sur axe des z
const int POS_MIN_X = 1200; // Position min pour servo pour rotation sur axe des x
const int POS_MAX_X = 2500; // Position max pour servo pour rotation sur axe des x
const int SERVO_Z = 5; //declaration constante de broche, servo pour rotation sur axe des z
const int SERVO_X = 6; //declaration constante de broche, servo pour rotation sur axe des x
/// Déclaration des variables
int rxByte = 0; // variable de stockage des octets reçus par port série
int rxNumber = 0; // variable de calcul du nombre reçu par port série
int posZ = 0; // Position axe z
int posX = 0; // Position axe X
///
/// Instancialtion des servos
///
Servo zServo;
Servo xServo;
/// \bref Initialisation des servomoteurs
/// la fonction setup() est exécutée en premier 1 seule fois au démarrage du programme
void setup()
{
pinMode(SERVO_Z, OUTPUT); //met la broche en sortie
pinMode(SERVO_X, OUTPUT); //met la broche en sortie
zServo.attach(SERVO_Z, POS_MIN_Z, POS_MAX_Z);
xServo.attach(SERVO_X, POS_MIN_X, POS_MAX_X);
Serial.begin(9600); // initialise connexion série à 115200 bauds
posZ = POS_MIN_Z;
posX = POS_MIN_X;
}
/// \bref Boucle principale
/// la fonction loop() s'exécute sans fin en boucle aussi longtemps que l'Arduino est sous tension
void loop()
{
if(posZ == POS_MIN_Z){
for(posZ = POS_MIN_Z; posZ <= POS_MAX_Z; posZ++){
zServo.writeMicroseconds(posZ); // génère l'impulsion de la durée voulue en µs pour le servomoteur
delay(5);
}
for(posX = POS_MIN_X; posX <= POS_MAX_X; posX++){
xServo.writeMicroseconds(posX); // génère l'impulsion de la durée voulue en µs pour le servomoteur
delay(5);
}
}else{
for(posZ = POS_MAX_Z; posZ >= POS_MIN_Z; posZ--){
zServo.writeMicroseconds(posZ); // génère l'impulsion de la durée voulue en µs pour le servomoteur
delay(5);
}
for(posX = POS_MAX_X; posX >= POS_MIN_X; posX--){
xServo.writeMicroseconds(posX); // génère l'impulsion de la durée voulue en µs pour le servomoteur
delay(5);
}
posZ = POS_MIN_Z;
}
}
//seb03000
Re: présentation de seb03000
Posté : 15 mars 2012, 21:31
par seb03000