présentation de seb03000
Posté : 03 août 2011, 20:13
Nom est prénom: Rousseau Sébastien.
Pseudo: seb03000
Age: 27 ans
Équipement (si vous en possédez):
AK 47S ( 380fps , 1.6 joule) et un Beretta M92 a gaz ( 280fps , 0.6 joule ) est un Fusils a pompe ( Puissance : 350fps (1.14 joules) un Holster De Cuisse , plus Masque Facial / Protection Visage (Néoprène) Et Cou + Oreilles... plus lunette de protection , plus Pantalon militaire camouflage de combat, plus gans noir
Moyen de Transport:
Voiture Peugeot 406 TD
Présentation:
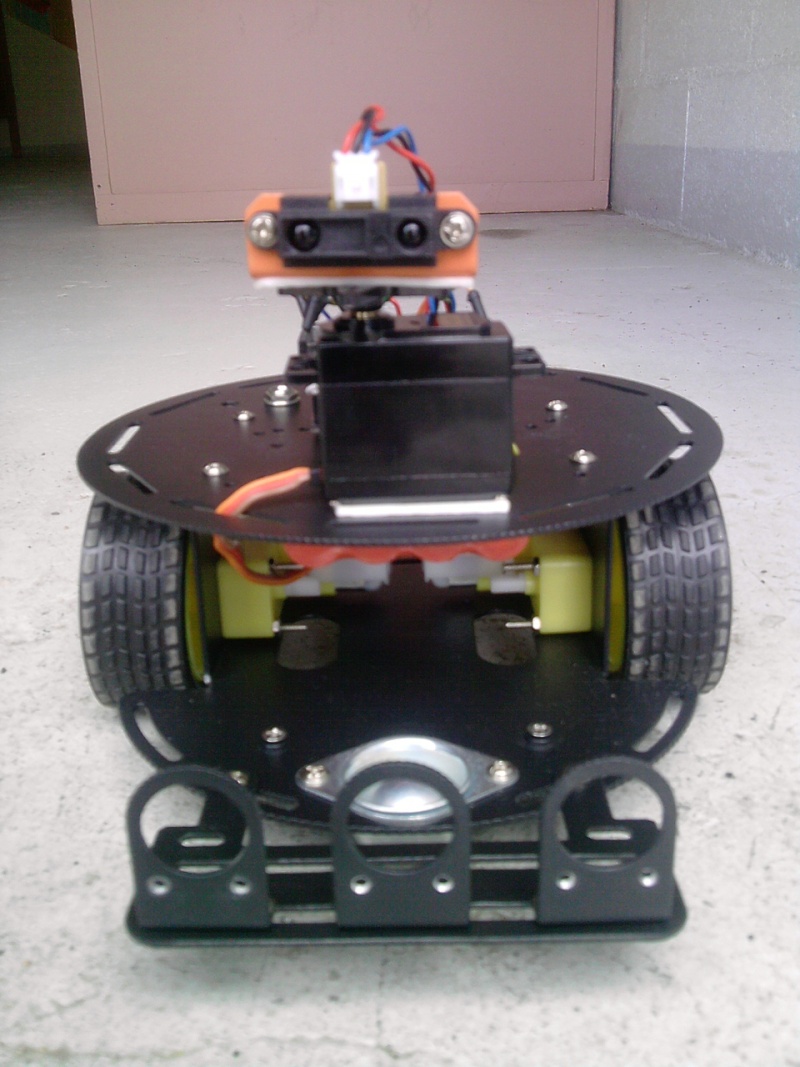
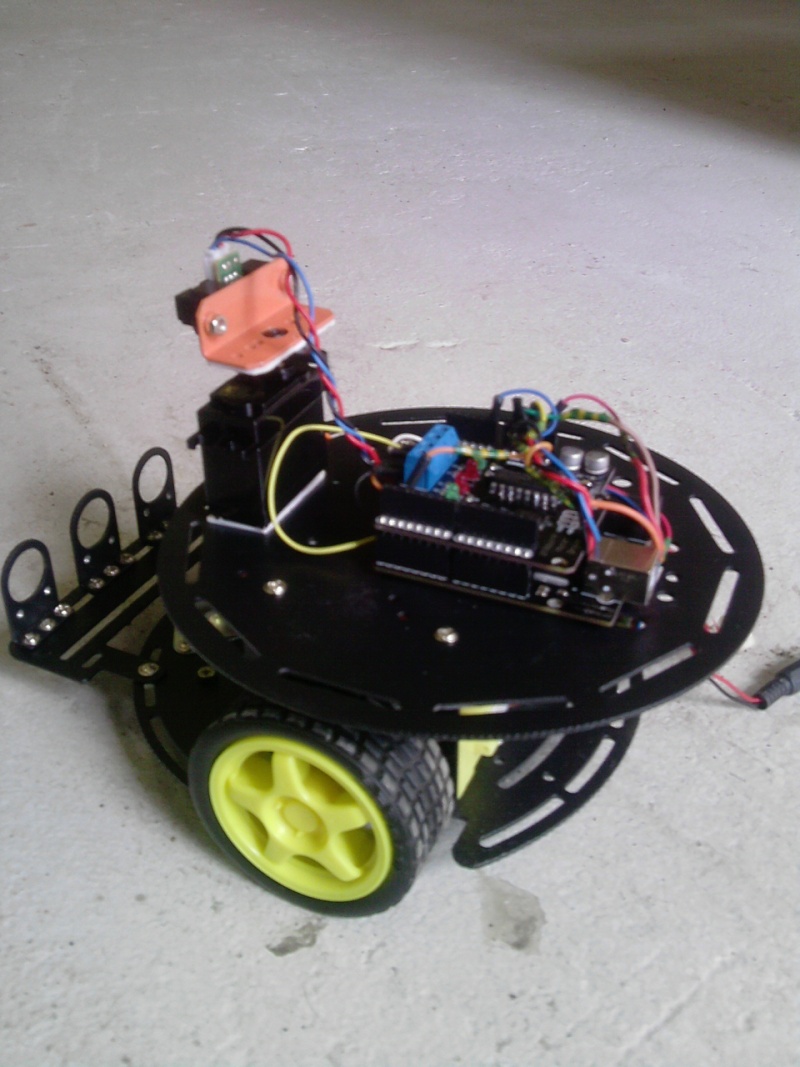
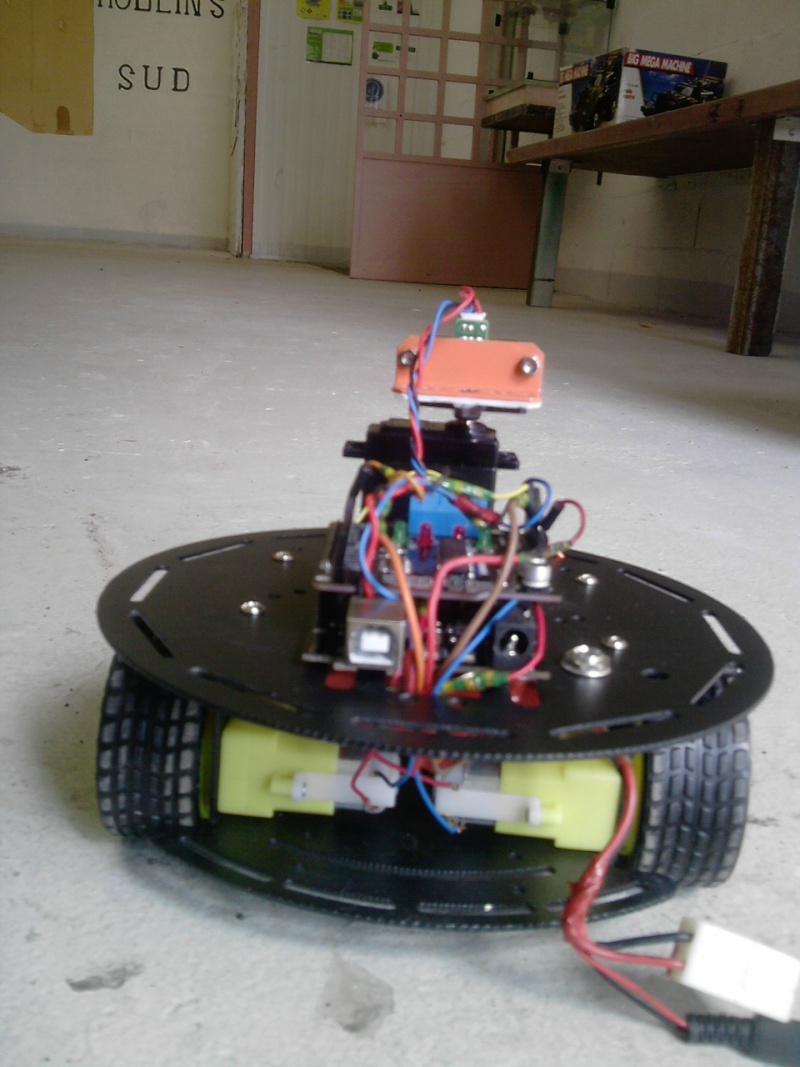
Je vie sur moulins dans le 03 en Auvergne je bosse dans un garage d'auto mobile est deux roue c'est aussi une association. Est mon 2 bouleau, a temps perdu je suis informaticien. Est la en se moment je bosse sur un projet dans la robotique en intelligence artificiel j'ai un robot a mon active que j'ai créé de A a Z j'attaque mon 2 . sinon je suis ravie d’être parmi vous tous grasse a un amie qui me la fait découvrir il se nome Rémy
Pseudo: seb03000
Age: 27 ans
Équipement (si vous en possédez):
AK 47S ( 380fps , 1.6 joule) et un Beretta M92 a gaz ( 280fps , 0.6 joule ) est un Fusils a pompe ( Puissance : 350fps (1.14 joules) un Holster De Cuisse , plus Masque Facial / Protection Visage (Néoprène) Et Cou + Oreilles... plus lunette de protection , plus Pantalon militaire camouflage de combat, plus gans noir
Moyen de Transport:
Voiture Peugeot 406 TD
Présentation:
Je vie sur moulins dans le 03 en Auvergne je bosse dans un garage d'auto mobile est deux roue c'est aussi une association. Est mon 2 bouleau, a temps perdu je suis informaticien. Est la en se moment je bosse sur un projet dans la robotique en intelligence artificiel j'ai un robot a mon active que j'ai créé de A a Z j'attaque mon 2 . sinon je suis ravie d’être parmi vous tous grasse a un amie qui me la fait découvrir il se nome Rémy